PHOTO
Diventapiùfacileper i robot manipolare, sbucciare e affettare ortaggi e frutta curvi, diformeedimensioni diverse.Queste azioni, intuitive per l'essere umano, risultano infatti alquanto complesse per gli automi che per compierle hanno bisogno di comprendere posizione, forma e proporzioni degli oggetti con cui interagiscono. Grazie ad unnuovo approccio, descritto sulla rivista Science Robotics e messo a punto dai ricercatori del Politecnico Federale di Losanna e dell'Istituto di ricerca Idiap, ora i robot riescono ad eseguire azioni continue e ricche di contatto su diversioggettidalla formairregolaree diuso molto comune.
"Mentre leforme piane o regolari hanno unsistema di riferimento che può essere rappresentato da punti di pertinenza comuni,è molto piùdifficile- prosegue il ricercatore - creare un sistema generalizzato per gli oggetti curvie questo, a sua volta, rende più difficile per i robot trasferire le azioni a beni di forma irregolare". Per superare il problema i ricercatori hannogeneratoper i vari oggetti una nuvola coordinatein modo da definire dei punti di riferimento chiave lungo la superficie. In questo modo hannocreato una rappresentazione continua dell'oggettoda utilizzare per la direzioni rilevanti per il compito, come "verso" o "lungo" la superficie.
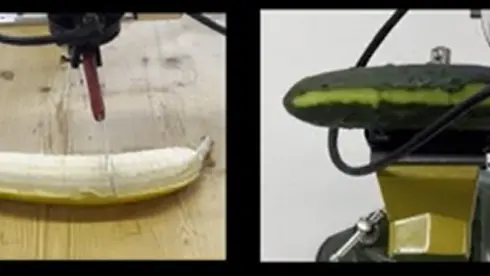
"L'approccio- sottolinea Bilaloglu - hafunzionato anchecon dati dei sensori parziali o rumorosi,o in ambienti di lavoro disordinati". Tra i compiti eseguiti:sbucciare unabananao unapatatadolce, affettare verdure e sondare la superficie di diversi oggetti stampati in 3D.
